将来のビジネスモデル
 大勢の人が集まる繁華街で車の運転中に意識がなくなり、大きな事故が起きました。訪問先の道順案内や運転中の居住性には異常なほど最新技術を採用し、人と物の移動に貢献してきました。
大勢の人が集まる繁華街で車の運転中に意識がなくなり、大きな事故が起きました。訪問先の道順案内や運転中の居住性には異常なほど最新技術を採用し、人と物の移動に貢献してきました。
燃費向上などかつてないほど車をめぐる技術が進歩しています。ここにきてまた、安全性が問われています。自動運転、ロボットタクシーが話題を提供しています。多くの先端企業が将来のビジネスモデルとして研究に取り組んでいます。
ここでは、予算がありませんので数式のグラフィック描画や移動先の予想などの観点から自動運転を模索してみます。
フェールセーフと自動運転の模索
たとえ誤動作があったとしても安全側に自動的に移行するような方式(フェールセーフ)の採用が急務です。ここでは2台の車の移動先を確認し、衝突が起きそうな場合の回避策をシミュレーションしてみました。

探求するには華も必要です。そこで最初の車はリサジュー曲線を描くように走り、もう1台の車はアルキメデスの螺旋(らせん)を描きます。両車の走行スピードは意識せず、両車の距離で衝突を判定します。
リサジュー曲線
 2つの曲線について、おさらいをしておきます。リサジュー曲線は直角な2方向の単振動を組み合わせたときに描かれる図形です。今回は極座標のr=sin3θを用います。フランス人のリサジューという物理学者が研究を極めたそうでこの名が残っています。
2つの曲線について、おさらいをしておきます。リサジュー曲線は直角な2方向の単振動を組み合わせたときに描かれる図形です。今回は極座標のr=sin3θを用います。フランス人のリサジューという物理学者が研究を極めたそうでこの名が残っています。
パラメータの変更により様々な曲線に千変万化し、あざやかな軌跡を描くことから理系大学の校章に使用されているようです。
アルキメデスの螺旋
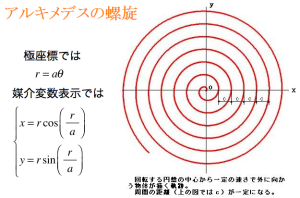 アルキメデスの螺旋はちょうど、蚊取り線香のような帯状の曲線を描きます。式は図のなかに示されています。螺旋は渦巻きとも言われ、幅が一定になるのが特徴です。
アルキメデスの螺旋はちょうど、蚊取り線香のような帯状の曲線を描きます。式は図のなかに示されています。螺旋は渦巻きとも言われ、幅が一定になるのが特徴です。
極座標で r =a θ(a は定数)から類推されるように、中心点(θ=0, r=0)の回りを一定の角速度で回転する直線上を一定の速さで運動する点 の軌跡といえます。
自動運転のシミュレーション
運転モードは2つあり、ただ数式にのっとり計算して得られた曲線上を走るなりゆき運転と2台の走行位置を確認し、衝突の恐れがある場合、一方の車が遠ざかるまで待機する自動制御運転があります。
なりゆき運転
最初は自動制御の対象でないなりゆき運転が開始されます。2台の車は中心点から走り出し、青色で表示される①車はリサージュ曲線上を、中心から離れる方向に反時計方向に走ったらカーブして中心に戻ります。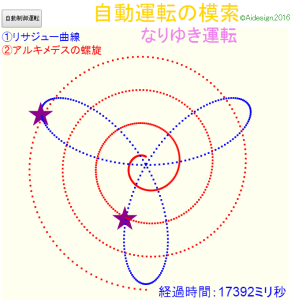
一方、赤色で表示される②車はアルキメデスの螺旋に則り、左巻きに渦巻いて進みます。なりゆき運転は、数式に導かれるコースを忠実にたどると衝突が起きることがあります。
衝突が起きると星型5角形が表示されます。衝突が起きても同一速度で遅滞なく進行するので再び衝突する可能性があります。
第2、第3の衝突が起きたら同様の衝突マークが表示されます。青色の経過時間が表示されたらなりゆき運転は終了です。
自動制御運転
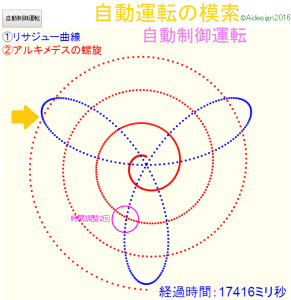 なりゆき運転が終了すると、左上の自動制御運転ボタンをクリックして自動制御運転に進むことができます。なりゆき運転と同様に両車は数式に則って進行します。
なりゆき運転が終了すると、左上の自動制御運転ボタンをクリックして自動制御運転に進むことができます。なりゆき運転と同様に両車は数式に則って進行します。
両車の距離が短くなり、衝突が起きると予想される場合には、ピンク色の円が描かれ相手の車が離れるまで待機します。待機した回数が円の左に表示されます。衝突の判定は33ms間隔で確認され、待機した場合は車の進行にわずかな遅れが生じます。
両車のタイミングに変化があったため、なりゆき運転で発生した2度目の衝突処理(左上の矢印部の衝突)をすることがないように状況が変わっています。
自動運転の動作例
まとめ
車の運転でたった2台による自動制御運転をシミュレーションしました。実際はもっと多くの車が絡み合い、交差点も三叉路、五叉路と複雑です。
すでに運用中の自動運転車の事故が報道されています。まだ、全自動制御運転車は無理でしょうが、人間の不注意による運転を是正する自動運転は早急に実施する施策と思われます。